




En este artículo se analizarán diversos equipos de vigilancia submarina capaces de proporcionar alerta temprana al mando.

Desde la invención de los buques y su uso en las guerras, siempre ha sido de vital importancia conocer la posición y el tamaño de la flota enemiga. Con la aparición del submarino fue necesario desarrollar métodos novedosos capaces de contrarrestar su efectividad. Puesto que las ondas electromagnéticas (radar) se transmiten muy mal en medio acuoso, se recurrió a las ondas mecánicas (sonido) como medio para la detección y localización de estos artilugios. Tanto es así que desde hace 70 años la herramienta principal para búsqueda antisubmarina es el sónar [1]. Desde entonces, la Detección Acústica Submarina no ha hecho más que perfeccionarse generalizándose sistemas como la red SOSUS o los buques de vigilancia oceánica, temas todos ellos que trataremos en las siguientes líneas.
Antes de comenzar, es conveniente mencionar los posibles caminos que el sonido puede tomar en la mar, ya que la mayoría de los sensores a estudiar se centran en el tratamiento de la energía acústica.
La manera más sencilla se conoce como camino directo, el cual se produce cuando el emisor y el receptor se encuentran lo suficientemente cerca. Canal de superficie, por las características físicas del medio el sonido se queda atrapado en los primeros metros de profundidad. Rebotes en el fondo y en la superficie, el sonido se propaga por las zonas con menor velocidad de propagación acústica, por tanto, cuando llega a los extremos, se refracta o refleja y vuelve al mar. Zona de convergencia, cuando los rayos acústicos se concentran en la superficie. Canal sonoro profundo o canal SOFAR, se produce cuando hay un espacio en el que la velocidad de propagación acústica es mínima por lo que los rayos acústicos quedan confinados en su interior. Camino acústico fiable, este canal conforma un tipo especial de camino directo que se extiende hacia arriba en la superficie del agua desde un punto por debajo de la profundidad crítica en la mar. Por último, para suavizar el párrafo, se adjunta una imagen en la que se plasman los conceptos mencionados [2]:
![Ilustración 1 – Modelos de propagación acústica [2].](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEiVikzYqvp6XGeHTwKWT7zp3_DehHSH8XanSH498WbULar5qs51RYPEWcfT_sJp6p8zfR1tCNy6corFtJJsjg501Q8Tob8KFJi5Kl3vqLwEMsazA5Y7VPduNW0b9JdduN2xb_pjWuCXreJDZMDsa4irw4MVlrk1-Bzgq0uqSoVUQ610wFUD2w/s1024/Ilustraci%C3%B3n%201%20%E2%80%93%20Modelos%20de%20propagaci%C3%B3n%20ac%C3%BAstica%20%5B2%5D..webp "Ilustración 1 – Modelos de propagación acústica [2].") |
| Ilustración 1 – Modelos de propagación acústica [2]. |
En este artículo se analizarán diversos equipos de vigilancia submarina capaces de proporcionar alerta temprana al mando. Estos artilugios pueden ser móviles o fijos y aprovechar los distintos caminos acústicos posibles como el canal sonoro profundo o la propagación por camino directo. Además, desde un punto de vista militar, llegan a tener importancia estratégica pues un sistema de estas características detectaría submarinos SSBN [3, 4, 5].

Ilustración 2 – Perfiles de velocidad de sonido promedios para distintos paralelos a lo largo del meridiano 150ºW en el océano Pacífico. Nótese que los perfiles convergen a gran profundidad puesto que la temperatura es prácticamente uniforme a cierta profundidad sin importar la latitud. Fuente: dosits.org.
Aunque, inicialmente, estos sistemas se utilizaron para la defensa de puertos importantes como se verá más adelante, años más tarde se colocaron en estrechos o enclaves estratégicos para conocer si un submarino u otro tipo de nave había accedido a un cuerpo de agua determinado. Cumpliendo lo recogido en el punto 5 del concepto de operaciones estadounidenses conocido como lucha antisubmarina de espectro completo (Full Spectrum ASW) [6]. Así, también se evita la necesidad de disponer de una agrupación naval siguiendo continuamente a un submarino, reduciendo posibles tensiones políticas [7]. Por así decirlo, sería establecer un control laxo sobre el submarino, pues en cualquier momento las fuerzas aliadas serían capaces de localizarlo, ya que cuentan con la información remitida por los sensores.
Actualmente, debido a la proliferación de un gran número de submarinos y éstos cada vez más silenciosos, se está trabajando en la introducción de sistemas desplegables in situ y móviles, aprovechando las nuevas tecnologías. Como curiosidad, las primeras defensas de puerto consideraban el uso de mallas para la pesca del siluro [8]:
![Ilustración 3 – Funcionamiento de las barreras antisubmarinas [8].](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEhLZSLPfcNXOt6uOshdINVy5uMTLJZeFUA829eKxk6B5Egh75GmGt2IuD6IPPetvHYuwgLLN0K4acUi5VtYxKlVpAdIVOrVSJ1J_s9kAa5v26iKuM4_p_LMR3AjTwQkxx0MRNp3rlS4-vuwilJIjKdimTQpNIasscona6XzkHJqCibxHwBsPA/s885/Ilustraci%C3%B3n%203%20%E2%80%93%20Funcionamiento%20de%20las%20barreras%20antisubmarinas%20%5B8%5D.webp "Ilustración 3 – Funcionamiento de las barreras antisubmarinas [8].")
Ilustración 3 – Funcionamiento de las barreras antisubmarinas [8].
Antes de comenzar, se establecerá una clasificación que sirva como guía. De esta manera, se puede diferenciar entre sistemas fijos (Fixed Surveillance System), como el SOSUS (Sound Surveillance System); móviles (Mobile Surveillance System), como el SURTASS (Surveillance Towed Array Sensor System) instalado en los buques T-AGOS (Tactical Auxiliary General Oceanographic Surveillance), o desplegables (Deployable Surveillance System). Estos últimos son más recientes y, por tanto, menos maduros [2].
Además, se debe tener en cuenta la introducción de algoritmos de ayuda a la decisión como el Acoustic Automated Processing (AAP) destinado a proporcionar un subsistema capaz de automatizar los procesos de reconocimiento de firmas y así poder suministrar la capacidad de alerta temprana mediante los sensores de vigilancia fijos (FSS) [9]. Este desarrollo se fundamenta en la Línea de Esfuerzo (LOE) Azul Strengthen Navy Power at and from the Sea del documento publicado por el AJEMA (Chief of Naval Operations, CNO) estadounidense: Design for Maintaining Maritime Superiority [10].
Cambiando un poco de tercio, también es importante analizar la supervivencia de estos sensores en caso de conflicto. Como es de esperar, aunque los sistemas centralizados y las partes fijas de los distribuidos se encuentren al abrigo de las profundidades estratégicamente emplazados [1, 2], existen naciones con potentes capacidades para degradarlos [11, 12], bien auscultando los cables [13] (Operación Ivy Bells [14, 15]) o bien destruyendo parte o toda la instalación [16], como ha ocurrido recientemente con los gaseoductos Nord Stream 1 y 2 [17]. En este caso concreto, los gaseoductos estaban fuera de servicio por lo que las connotaciones son menores que el ataque a una estación de la red IUSS (Integrated Undersea Surveillance System), el cual se podría dar durante un proceso de escalada vertical [18]entre la Federación Rusa y la OTAN.
En el primer caso (auscultación de cables submarinos) es probable que no se tenga constancia de la posible intervención del sistema hasta que no se realice una inspección de la zona. Esto se puede mitigar con una correcta encriptación de la información. Por su parte, la destrucción de los cables obliga a la presencia de un buque especializado, normalmente civil, cuyo coste es muy elevado y el tiempo de reparación relativamente alto [19, 20, 21]. Por ello, todo lo relacionado con este tipo de sistemas deberá llevarse con el mayor de los secretos [2].
![Ilustración 4 – Prototipo de estación submarina para la recogida de un UUV [22].](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEgBqZaGaWpbLG4dxsXcvdLUX04y69_zuDHBVexz6KCaQKpq3_D1JSrQgMwETPLsSFhIo0IqaSVjFQ5ut3Rj-JxQgmZd9owVfRjLYXLgvWXlaRE5xhZXnOeqS1SQs-KbYksJSx_3DyPgyzKkqEp4mueGPYYulP9nsDYhXsS1JPv0AFCd1jWhEw/s1024/Ilustraci%C3%B3n%204%20%E2%80%93%20Prototipo%20de%20estaci%C3%B3n%20submarina%20para%20la%20recogida%20de%20un%20UUV%20%5B22%5D.webp "Ilustración 4 – Prototipo de estación submarina para la recogida de un UUV [22].")
Ilustración 4 – Prototipo de estación submarina para la recogida de un UUV [22].
Como era de esperar, aunque no son la razón principal del artículo, también será importante tener en cuenta a los drones submarinos, pues están llamados a trabajar en colaboración con los sistemas fijos. Asimismo, se debe remarcar que cada vez será más difícil establecer un discriminante robusto entre las definiciones de vehículo y sensor [7].
Al igual que se mencionó en el artículo anterior sobre drones submarinos, dependiendo de la longitud a la que se desee detectar, se trabajará en unas frecuencias o en otras.
Puesto que es algo complejo hacer un estudio exhaustivo de todos y cada uno de los proyectos y tampoco es objeto de este artículo asustar al lector con todos ellos, se recogerán los más importantes. Por costumbre, se comenzará con los sistemas estadounidenses para continuar con los europeos, japoneses, indios y australianos, y terminar con los rusos y los chinos.

Ilustración 5 – Nivel de ruido y frecuencia para los sonidos que pueblan los dominios de Poseidón. Fuente: Seiche.com.
Sistemas de Vigilancia Acústica Occidentales
Ya durante la Primera Guerra Mundial se instalaron las primeras cadenas de hidrófonos, compuestas principalmente por receptores telefónicos capaces de soportar las presiones del agua. Estos rudimentos estaban pensados para trabajar con las ondas de sonido transmitidas por aire, por lo que su éxito se debió al enorme ruido que emitían los submarinos de la época [18].
Por ejemplo, se colocaron en la isla de Hyères (Francia) justo delante de la entrada a la base más importante de la marina francesa en el Mediterráneo, Tolón [23, 24, 25]. De hecho, el primero en trabajar con el sónar activo fue el reconocido físico galo Paul Langevin [26].
Años más tarde, durante la Segunda Guerra Mundial, su uso se extendió y se empezaron a utilizar tanto en buques como en estaciones fijas. Los británicos acuñaron el término ASDIC (Anti-Submarine Detection Investigation Committee), mientras que los estadounidenses prefirieron el más usado SONAR (Sound Navigation and Ranging) [18].
Por ejemplo, los ingleses lo emplearon de manera combinada con magnetómetros dispuestos en el lecho marino para la protección de puertos importantes como el de Haifa [27]. Asimismo, se cree que también se empleó en Gibraltar frente a los raids de la Décima Flotilla MAS (Mezzi d’Asalto) de la Regia Marina [28]. Todos estos sistemas, eran principalmente de corto alcance y estaban centrados en la detección de submarinos enemigos que se acercaran a puertos aliados [1]. De hecho, en aquella contienda, los principales medios para buscar submarinos eran la vista y el radar [29], donde tuvo lugar una interesante carrera entre la mejora de las antenas emisoras (por parte aliada) y de los receptores ESM (por parte alemana).
![Ilustración 6 – Marinos soviéticos saludan amigablemente a un Lockheed P2V Neptune sobrevolando un submarino no aliado [30].](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEgpkWKjmg3DxsuepFmXHvrKtdCiTWSBvtiyZD4jhiI50vUPZKWQmQbt3VEPbSQEfh2y4k6z8F5rvwRSdGS-GqgFksIzz0aFDi2n14PnMiqKM_sC_9ITfQNxfm6N7ONQbPmozS_3nbCqPD0HTbkZGxmf_ewgrN-AgB67w05JozQ4bJvQhs1sIg/s883/Ilustraci%C3%B3n%206%20%E2%80%93%20Marinos%20sovi%C3%A9ticos%20saludan%20amigablemente%20a%20un%20Lockheed%20P2V%20Neptune%20sobrevolando%20un%20submarino%20no%20aliado%20%5B30%5D.webp "Ilustración 6 – Marinos soviéticos saludan amigablemente a un Lockheed P2V Neptune sobrevolando un submarino no aliado [30].")
Ilustración 6 – Marinos soviéticos saludan amigablemente a un Lockheed P2V Neptune sobrevolando un submarino no aliado [30].
Durante la Guerra Fría, la guerra antisubmarina alcanzó su época de mayor esplendor, pues la Unión de Repúblicas Socialistas Soviéticas (URSS) fue una potencia cuyo fundamento se encontraba en la denegación del mar al adversario (la Federación Rusa sigue recurriendo a esto) empleando para ello buques de superficie y submarinos fuertemente armados [31]. Ante el temor de que estos últimos tuvieran un radio de acción grande (gracias a la introducción de los mástiles de inducción y, posteriormente, de la propulsión nuclear) y pudieran comprometer las líneas de comunicaciones marítimas entre Estados Unidos y Europa [32], el país americano se vio obligado a desarrollar un novedoso sistema para la escucha de submarinos por todo el orbe. Conocido como SOSUS (Sound Surveillance System, su nombre desclasificado inicialmente fue CAESAR [33, 34]) [35], contó con una estación en la isla de La Palma (islas Canarias) [18, 36, 37, 38].
Esta red de sensores, puesta en funcionamiento por primera vez 1961 y compuesta por hidrófonos fijos [39], permitió constituir una malla de alerta temprana (gracias al enorme alcance) para los medios de la US Navy, que en aquella época incluían aviones de patrulla marítima, buques y submarinos [1]. De esta forma, cada vez que una estación (ubicada en territorio propio o aliado) detectaba el posible ruido de un submarino, inmediatamente se lanzaba la tripulación de alarma (en aquel momento, los P3 también hacían servicio de alarma) y se le ordenaba que escudriñara el área en busca del posible fantasma [40].
.")
Ilustración 7 – Propagación acústica en el canal SOFAR. Las ondas de sonido que emanan de una fuente son refractadas hacia la región de menor velocidad de propagación, confinando el sonido en el mencionado canal. Fuente: Paul Webb (Roger Williams University).
Esta tecnología se basa en el uso del canal sonoro profundo (Deep Sound Channel, DSC, por sus siglas en inglés) [1] descubierto de manera independiente por los investigadores Maurice Erwig y J. Lamar Worzel de la Universidad de Columbia [41], y Leonid Brekhovskikh en el Instituto de Física de Lebedev [42] durante la década de los 40. Este canal se encuentra entre los 700 y 1300 metros de profundidad y se caracteriza por atrapar las ondas sonoras en su interior, de manera que actúa como una guía de onda. También conocido como canal SOFAR (Sound Fixing and Ranging Channel) [43].
Al actuar como una guía de onda, la propagación es cilíndrica por lo que solo hay pérdidas en el plano, a diferencia de la propagación esférica [44]. El uso del océano como una guía de onda gigante cuyos límites son el fondo marino y la superficie de la mar sigue estando vigente gracias a las técnicas OAWRS (Ocean Acoustic Waveguide Remote Sensing) [45] y POAWRS (Passive Ocean Acoustic Waveguide Remote Sensing) [46].
![Ilustración 8 – Cobertura atlántica del sistema SOSUS entre los años 1958 y 1978 [47].](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEg12TbNMT565S_2cHzpDKK3h-2gnV358wYumJa3xGNvCueL73jyY_sXlvC39SO4U5ObW7NH8AchAJiMsTKgxSzlL9Mr9OhcuZ-LqiQqDdxCQQEbpn4bFo7X5753hfKMKuOA82lzqnqNJ9HAC9IX-FBYs39Orvgkr2gyevymF6QZVOV6Hg5SiA/s1024/Ilustraci%C3%B3n%208%20%E2%80%93%20Cobertura%20atl%C3%A1ntica%20del%20sistema%20SOSUS%20entre%20los%20a%C3%B1os%201958%20y%201978%20%5B47%5D.webp "Ilustración 8 – Cobertura atlántica del sistema SOSUS entre los años 1958 y 1978 [47].")
Ilustración 8 – Cobertura atlántica del sistema SOSUS entre los años 1958 y 1978 [47].
Asimismo, el desarrollo por parte de los laboratorios Bell del análisis LOFAR (Low Frequency Analysis and Recording) permitió tanto la representación de la señal acústica recogida en los lofargramas (adaptados a partir de un espectrograma acústico) como el análisis de la parte de baja frecuencia de la señal, indicando qué frecuencias estaban presentes [33, 35].

Ilustración 9 – Mapa confeccionado por la URSS acerca de su concepción del sistema estadounidense SOSUS. Fuente: Michael Flicker.
Debido a la información filtrada por el espía John Walker a la Unión Soviética y a la ya recabada por ellos [48], los ingenieros del país comunista trabajaron a destajo durante la década de los 70 para poner sus submarinos a la altura de los estadounidenses. De esta forma, en 1979 terminaron el primer submarino con un sistema apropiado de aislamiento y, en 1984 ya habían introducido las dos primeras clases de submarinos capaces de evitar las estaciones SOSUS [47, 49].
Esto provocó que la US Navy investigara en nuevas líneas para la detección temprana de los submarinos soviéticos [1], pues habían perdido parte de la ventaja que disponían gracias al sistema SOSUS. Por un lado, la puesta en servicio de buques de investigación oceanográfica dotados con una matriz de hidrófonos denominada Surveillance Towed Array Sensor System (SURTASS) [50] así como la instalación de un nuevo sistema de hidrófonos denominado Fixed Deployable System (FDS) [51], basado en el modo de propagación acústica conocido como Reliable Acoustic Path (RAP). Donde un receptor situado en o por debajo de la profundidad crítica puede detectar fuentes acústicas a poca profundidad hasta alcances moderados independientemente de las condiciones del agua cerca de la superficie o de la interacción con el fondo marino [52].
Es decir, en lugar de emplear el canal sonoro profundo recurría a lo que se conoce como camino directo [51]. Así cada sensor cubría un pequeño cono de la columna oceánica. Por tanto, el mencionado FDS es otro ejemplo de los sistemas de vigilancia fijos (FSS). Entre 1993 y 1996 se construyeron y desplegaron tan solo dos matrices FDS debido a la reducción de fondos posterior al fin de la Guerra Fría. Cada uno con un coste de mil millones de dólares en 1994. Los desarrollos de estos sistemas más allá de 1996 son clasificados [2].
No obstante, Cote menciona dos sistemas cuyo objetivo es alcanzar una capacidad de búsqueda de área amplia en el ambiente litoral [51]. El primero recibe el nombre de Advanced Deployable System (ADS) [33], mientras que el segundo se denomina Distant Thunder. El sistema ADS es una matriz pasiva situada en el fondo del océano que puede ser desplegada por un buque de superficie. Al igual que en su predecesor, el programa FDS, los sensores acústicos apuntaban hacia arriba aprovechando el modo Reliable Acoustic Path (RAP) [52]. Por su parte, Distant Thunder es un procesador de señales adjunto a los sistemas de combate antisubmarinos existentes capaz de reducir el ruido acústico de manera significativa.
La combinación de los sistemas fijos (FSS) tanto SOSUS como FDS con los sistemas móviles (MSS) compone el núcleo de las capacidades actuales del sistema estadounidense IUSS (Integrated Underwater Surveillance System) [2].
Además, según recoge Sutton, en los 80, Canadá y Estados Unidos comenzaron un interesante proyecto denominado Spinnaker, en honor a los científicos que colaboraron en él. Este programa, similar a la red SOSUS previamente mencionada, pretendía escuchar a los submarinos soviéticos bajo la capa de hielo ártico al norte de Canadá, donde se creía que se escondían. Para poder instalar los sensores y largar el cable, se tuvo que diseñar el vehículo autónomo antisubmarino más grande hasta la fecha: el Theseus AUV [53].
Una vez explicados los sistemas fijos, se procede con los desplegables. La gran mayoría de ellos se encuentran todavía en desarrollo y forman parte de iniciativas lideradas por agencias como Defense Advanced Research Projects Agency (DARPA), Office of Naval Research (ONR), Naval Undersea Warfare Center (NUWC), entre otras. Los esquemas propuestos incluyen sensores submarinos desplegables, sensores distribuidos en red, redes de comunicación y navegación subacuática, así como vehículos autónomos con sensores submarinos y equipos de comunicación o constelaciones submarinas.
Se pueden clasificar en cinco categorías principales [2]: sistemas de vigilancia de aguas someras (SWSS), sistemas de vigilancia pasiva de aguas profundas (DWP), sistemas de vigilancia activa de aguas profundas (DWA) y sistemas móviles activos/pasivos (MPAS).
Dentro de los primeros, se encuentra el ya mencionado Advanced Deployable System (ADS) o WQR-5, el Autonomous Off-Board Surveillance Sensor (AOSS), el Deployable Autonomous Distributed System (DADS), Seaweb [54, 55] y Persistent Littoral Undersea Surveillance Network (PLUSNet) [56].
Con respecto a los sistemas pasivos de aguas profundas se encuentran: Reliable Acoustic Path Vertical Linear Array (RAP VLA), Transformational Reliable Acoustic Path System (TRAPS) y Deep Reliable Acoustic Path Exploitation System (DRAPES). Como se puede observar todos ellos se fundamentan en aprovechar el camino acústico fiable (RAP) [52] lo que indica una transición desde el mítico canal SOFAR hasta este. Por último, se incluye uno activo, el Deep Water Active Distributed System (DWADS), optimizado para detecciones en zona de convergencia.

Ilustración 10 – Representación gráfica de la capacidad del sistema DASH basado en la propagación RAP. Fuente: Darpa.mil
En último lugar quedan los sistemas móviles activos/pasivos (MPAS) entre los que destacan: Submarine Hold at Risk (SHARK) y Sensor Hosted in Autonomous Remote Craft (SHARC).
Es conveniente mencionar que tanto el programa TRAPS como SHARK se desarrollaron inicialmente en el marco de un programa de la DARPA (Defense Advanced Research Projects Agency) conocido como DASH (Distributed Agile Submarine Hunting), dado a conocer en 2013 [2, 57].
Por último, la Oficina de Investigación Naval (ONR) se encuentra desarrollando una familia de sistemas desplegables (Deployable Family of Systems, DFoS) [58] centrada en el uso de soluciones asequibles para una vigilancia de área extensa flexible y con capacidad de respuesta, incluyendo los sistemas DWA, DWP y MPAS relacionados [2]. La fase inicial de dicho programa se anunció en febrero de 2020 [59].
De esta manera, se consolida y se fundamenta en los prototipos de sistemas que han sido desarrollados por programas de I+D estadounidenses en las dos últimas décadas. En principio, según el presupuesto de la US Navy para 2021, los sistemas DWP entrarán en producción a gran escala (FRP) en el año fiscal de 2023, mientras que el prototipado de los sistemas DWA comenzará en el año fiscal siguiente [60]. Sin embargo, en el documento para 2022, se eliminó la adquisición de sistemas DWA y MPAS, y se redujo el número de nodos DWP del Spiral 1.1 a adquirir [61].
Habiendo concluido la mención de los sistemas que actualmente se utilizan y se están desarrollando en Estados Unidos, se pasará a los de Europa del norte. Al igual que el país norteamericano, estos países tienen que hacer frente a la presencia amenazante de las unidades navales rusas (antes soviéticas) en sus cercanías. A veces, demasiado cerca.
Durante la redacción de este documento, se ha encontrado información tanto de Noruega como de Finlandia, los cuales cuentan con sistemas submarinos para diversos fines. En el caso concreto de Noruega, disponen del observatorio subacuático Lofoten-Vesterolen (LoVe) puesto en servicio en agosto de 2020 y operado por el Instituto de Investigación Marina (IMR) [62].

Ilustración 11 – Mapa del sistema LoVe instalado en las costas noruegas. A la derecha un esquema de conexiones del mismo. Fuente: Observatorio Subacuático LoVe.
Está compuesto por una red de sensores tanto acústicos como ópticos para la detección de mamíferos y otros seres vivos. Se hizo popularmente famoso después de la misteriosa avería que sufrió en 2021 [63], cuando, entre otros daños, desapareció parte del cableado de la instalación. Es conveniente mencionar que la propia Agencia de Investigación de Defensa de Noruega (FFI) reconoce que los datos recabados por este sistema son filtrados y preprocesados antes de enviarlos al Instituto de Investigación de Marina, eliminando en el caso de que sea necesario los registros que hayan podido dejar los submarinos o buques militares que transitaron por la zona [64].
Finlandia, por otro lado, cuenta con sistemas de vigilancia submarina desde los años 70 para proteger sus costas [65, 66]. La última iteración es el sistema SURA (Rapidly Deployable Underwater Surveillance System). Su programa de desarrollo comenzó en 1990 y las primeras demostraciones con sonoboyas se efectuaron en 2003 [67]. De estos experimentos se desprendió que la modificación de equipos ya existentes no era el camino adecuado. Por lo que se contrató a la empresa Patria Advanced Solutions para el desarrollo de un demostrador [68].
Aunque la función principal del sistema es la detección pasiva, se llevaron a cabo experimentos para dotarlo de capacidad activa en configuración multiestática y poder hacer frente a amenazas muy silenciosas [69]. Su demostración definitiva se llevó a cabo en 2006 y comenzó a complementar la red de vigilancia fija a finales de 2010. Está compuesto por un número variable de sensores, conexión mediante fibra óptica y un sistema de análisis y presentación de datos [65].
Se desconoce si fue este sistema el encargado de detectar a un objeto sospechoso en 2015 [70] o bien las antenas fijas (Passive Fixed Array) con las que ya contaba la marina finlandesa desde mediados de los 2000. Dicho objeto fue advertido mediante el lanzamiento de granadas de mano [65]. Asimismo, en el marco de este proyecto, también se investigó en la introducción de sensores no acústicos para la protección de instalaciones portuarias [71].
A pesar de que los países que conforman la Unión Europea están algo relajados en el ámbito antisubmarino, existen algunas propuestas recientes. Por un lado, el proyecto RACUN (Robust Acoustic Communications in Underwater Networks) financiado por la Agencia de Defensa Europea (EDA) centrado en el desarrollo de comunicaciones submarinas [72] y el proyecto USSPS (Unmanned Semi-fixed Sea Platforms for Maritime Surveillance) [73]. Además, el país más avanzado en esta materia, Francia, presentó al público en febrero de este año la Estrategia Ministerial para la Gestión de los Fondos Marinos [74, 75]. Por otra parte, se encuentran las iniciativas desarrolladas en el CMRE de La Spezia y la National Underwater Pole de la nación italiana.
En estos últimos años, el Indopacífico está ganando importancia debido, principalmente, al auge de China. Por esta razón, se debe prestar especial atención a dicha zona. Como era de esperar, los países vecinos están comenzando a invertir en este tipo de sistemas para controlar las posibles visitas de submarinos de ataque y estratégicos cerca de sus aguas, así como buques de superficie que puedan comprometer la seguridad.
Un ejemplo puede ser el incidente que tuvo lugar el pasado 8 septiembre cuando el buque de obtención de inteligencia chino Yuan Wang 5 fue interceptado por el buque 641 KRI Clurit de la marina indonesia cerca de la isla de Tunda. Consecuentemente, las autoridades indonesias advirtieron al incursor de que estaba violando la Convención de las Naciones Unidas sobre el Derecho del Mar y, por tanto, lo expulsaron [76].

Ilustración 12 – Buque de inteligencia chino Yuan Wang 5. Fuente: mod.gov.cn
De esta manera, la India ya dejaba caer en 2015 el interés en participar en el proyecto conjunto desarrollado por Estados Unidos y Japón denominado Fish-Hook [77] cuyo fin no es otro que vigilar la actividad submarina de la Marina del Ejército Popular de Liberación de China tanto en el Mar de la China Meridional como en la Cuenca del Océano Índico. Es preciso mencionar el interés de China en la ruta de seda marítima (Maritime Silk Road) que discurre por la región del océano Índico, afectando a la India [3], así como la presencia de submarinos chinos confirmada por el propio país [78].
No obstante, la adhesión al proyecto Fish-Hook presenta algunos inconvenientes. Por un lado, la posible respuesta del país comunista a la instalación de sensores submarinos cerca de las islas Andaman y Nicobar [79, 80], así como la presencia de militares extranjeros en India con acceso a la información sensible que pudieran recoger dichos sistemas [77]. A pesar de ello, en el mapa 4 del libro The Tools of Owatatsuni (ver Ilustración 15) se puede observar como la barrera Fish-Hook estadounidense alcanza las islas mencionadas [81].
Asimismo, India se vio obligada tanto en 2018 como en 2019 a detener a buques chinos de vigilancia e investigación que penetraron en su área económica exclusiva y plataforma continental sin su permiso, alegando que servían a intereses de la comunidad científica global [82]. Tal y como relata el autor, no es la primera vez que Beijing emplea buques civiles para la obtención de importantísimos datos acerca del comportamiento de los océanos, imprescindibles para la lucha antisubmarina. De esta forma, defiende Gokhale, se hace necesaria la capacidad de monitorizar y evitar que todos aquellos buques de investigación entren en la ZEE india.

Ilustración 13 – Estructura del concepto Underwater Domain Awareness [83].
Esto implica la definición de la estrategia Underwater Domain Awareness (UDA) [84]. Dicha estrategia tiene como fin evitar tanto la presencia de drones planeadores submarinos (ya ha ocurrido en aguas indonesias [85]) como de otras potenciales amenazas submarinas que puedan afectar a las líneas marítimas de comunicación (SLOCs) [83, 86, 87]. Aunque, a priori, se podría pensar en una combinación entre estaciones fijas y móviles, el almirante jefe del estado mayor de la marina india no indica la necesidad de estaciones fijas sino más bien de introducir 4 clases de vehículos submarinos remotamente tripulados con capacidad de trabajar en cardumen [80, 84].
![Ilustración 14 – Área de interés marítimo para Australia [2]:](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjNPUYEEwCcYdns7g1xrsfQw9k6dHiSahciItIPOyRtdz27lQw6G-WFuY-3nPs2Ps5sIdijKCd1E0-DUHR6M5TOfhsn6MNXEmbpaXsBQD2bnONaVcdaTENJkiCjB_FgT9STEOPPdA3nkY-yYAm2xE8cQXLrgb4ZbyamuwkgBnTopwTITmdMMQ/s978/Ilustraci%C3%B3n%2014%20%E2%80%93%20%C3%81rea%20de%20inter%C3%A9s%20mar%C3%ADtimo%20para%20Australia%20%5B2%5D.webp "Ilustración 14 – Área de interés marítimo para Australia [2]:")
Ilustración 14 – Área de interés marítimo para Australia [2]:
De igual modo, Australia también define un concepto Undersea Domain Awareness (UDA) [2] con el objetivo de defender el área submarina. Una misión recogida en el Plan de Estructura de la Fuerza de 2020, dónde se especifica la necesidad de mantener seguros los intereses de la nación en el dominio marítimo [88].
De esta manera, Australia emitió el pasado año una solicitud de información (RFI) [89] en el marco del programa Project SEA 5012 Phase 1 cuyo objeto es la adquisición de un sistema Integrated Undersea Surveillance (IUS) que aumente las capacidades del Mando de Teatro de Guerra Submarina. Este sistema, que entrará en servicio en 2025 [90], estará compuesto por vehículos autónomos desplegables y equipos acústicos fijos o móviles [89].
Por su parte, Japón, al igual que otras naciones comenzó a finales de la Primera Guerra Mundial a investigar en hidrófonos [81]. Experimentaron con modelos extranjeros, aunque fueron incapaces de conseguir una copia que funcionara. Sin embargo, en los primeros años 30 consiguieron instalar los primeros hidrófonos tanto en buques como en el fondo marino, los modelos 93 y 0, respectivamente. Dichos artilugios estaban basados en el hidrófono MV estadounidense. Tanto durante la guerra como después, los japoneses continuaron desarrollando sus capacidades en acústica submarina.
Asimismo, el país nipón cuenta en su territorio con un número importante de estaciones SOSUS que conforman una barrera conocida como Fish Hook Undersea Defense Line y que discurre desde los estrechos de Tsushima y Kyushu hasta el océano Índico como se puede ver en el siguiente mapa [81]:

Ilustración 15 – Barrera de defensa submarina estadounidense denominada Fish Hook [81].
En concreto, según se indica en el mismo libro, dispone de una treinta de cadenas de hidrófonos pasivos conectados a unas 14 o más estaciones de análisis. Aunque al principio, este sistema de defensa fue concebido para la defensa de instalaciones portuarias, se ampliaron sus capacidades para obtener información de los barcos que circulan por los estrechos y aguas cercanas. Los sistemas instalados reciben las denominaciones de LQO-3A y LQO-4. Por último, hay que indicar que también cuenta con sensores magnéticos además de los acústicos y un importante complejo para el análisis de señales.
Una vez presentados los sistemas de vigilancia fijos occidentales, se pasará a analizar los buques de investigación oceanográfica o sistemas móviles de vigilancia (Mobile Surveillance System). Estas plataformas cobraron especial importancia una vez que los submarinos soviéticos consiguieron superar el sistema SOSUS. Así, estos barcos eran desplegados en las zonas de operaciones con la idea de ampliar el área de detección y no estar limitado al alcance que proporcionaban las antenas fijas en el lecho marino.
No obstante, no dejan de ser buques auxiliares sin armas para defenderse y con la imposición de navegar despacio y en línea recta para evitar problemas a la hora de recibir las ondas acústicas [1]. Este último problema se puede mitigar mediante la estimación de la forma del sónar remolcado (Towed Array Shape Estimation) [91]. El año pasado Canadá y la firma ULTRA lanzaron un programa de investigación conjunta en el que tratarían esta línea [92].
Aunque estos buques son muy costosos, tanto Estados Unidos como Japón cuentan con sus respectivas clases. Por un lado, la US Navy dispone en su inventario de cinco unidades, cuatro de ellos pertenecientes a la clase Victorious y un quinto a la clase Impeccable. Inicialmente, se pensó en construir 6 buques de esta clase pero fueron cancelados. Los de la clase Victorious son: T-AGOS-19 USNS Victorious, T-AGOS-20 USNS Able, T-AGOS-21 USNS Effective y T-AGOS-22 USNS Loyal [93]. Mientras que el solitario de la clase Impeccable es el T-AGOS 23 USNS Impeccable [94]. Antes de continuar, es preciso descifrar el acrónimo T-AGOS que esconde Tactical Auxiliary General Ocean Surveillance [95]. Todos ellos son operados por el Programa de Misión Especial del Comando de Transporte Marítimo Militar (Military Sealift Command’s Special Mission Command) [96].
%20de%20la%20clase%20Victorious%20en%20dique%20seco%20en%20Yokosuka%20(Jap%C3%B3n).%20Obs%C3%A9rvese%20la%20peculiar%20forma%20de%20la.webp)
Ilustración 16 – USNS Effective (T-AGOS 21) de la clase Victorious en dique seco en Yokosuka (Japón). Obsérvese la peculiar forma de la obra viva de los buques SWATH, así como los estabilizadores en la proa, en la parte interna del catamarán.
Al igual que el resto de los buques de este negociado, son de tipo catamarán con una superficie de flotación reducida siguiendo el concepto inventado por el canadiense Frederick G. Creed en 1938 y denominado en inglés Small Waterplane Area Twin Hull (SWATH). Este concepto consigue reducir el movimiento del barco provocado por el oleaje gracias a que coloca parte de la flotabilidad necesaria para mantener el barco a flote por debajo de la línea de flotación a diferencia del resto de buques que dispone toda la flotabilidad en la superficie del agua. Las estructuras que aportan flotabilidad por debajo del agua se conectan al resto del casco mediante una estructura vertical como se puede ver en las distintas imágenes que acompañan al texto [97].

Ilustración 17 – Modelo en 3D de una estructura SWATH [97].
Regresando a los buques estadounidenses, los cuatro primeros tienen una eslora de 70 metros, una manga de 30 metros y un desplazamiento de 3.384 toneladas [96]. Mientras que el USNS Impeccable presenta una eslora de 86 metros, una manga de 30 metros y un desplazamiento algo superior que sus predecesores, llegando hasta 5.370 toneladas [96].
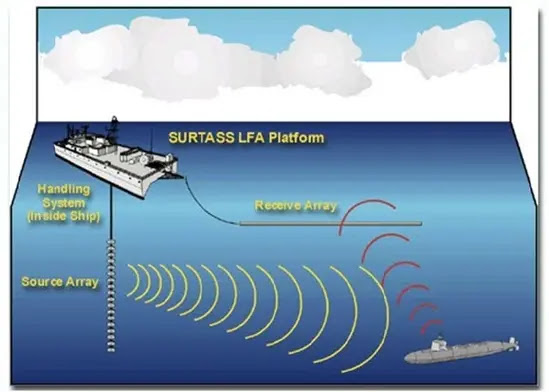
Ilustración 18 – Esquema del sistema SURTASS. Fuente: NOAA.
Todos ellos cuentan con el potente sistema AN/UQQ-2 SURTASS LFA (Surveillance Towed Array Sensor System Low Frequency Active) [98]. El desarrollo de este sistema comenzó en 1973, alcanzando la capacidad inicial operativa en noviembre de 1984. El sónar remolcado original consistía en una matriz lineal pasiva de unos 1600 m. Es capaz de operar a velocidades entre 3 y 10 nudos, a unas profundidades de 150 hasta 460 m [2].
Entre finales de los 80 y principios de los 90, la US Navy comenzó a trabajar en el desarrollo de un sistema activo de baja frecuencia que complementara el sónar pasivo (Programa Artemis). En 2004 se llevaron a cabo las pruebas de mar a bordo del USNS Impeccable [99], y entre 2004 y 2006 se produjo su entrada en servicio [2]. Años más tarde, en 2016, entró en servicio una versión más pequeña denominada Compact Low Frequency Array (CLFA).
Actualmente, Estados Unidos se encuentra definiendo las capacidades de un futuro sustituto bajo el programa T-AGOS (X) o T-AGOS-25 [100]. Esta nueva serie de siete buques (sustituye a 5) mantendrá el diseño SWATH, pero incrementará considerablemente su tamaño llegando a las 8500 toneladas de desplazamiento.
Además, entre 2017 y 2019 se desarrolló un sistema SURTASS expedicionario conocido como SURTASS-E para poder emplearlo en buques de oportunidad (Vessels of Opportunity, VOO) y así incrementar el número de barcos con capacidad de vigilancia oceanográfica [2].
Por otro lado, la Fuerza Marítima de Autodefensa de Japón (Japan Maritime Self-Defense Forces) dispone de tres buques de este tipo. Los tres fueron construidos en el astillero de Tamano por la empresa Mitsui Engineering & Shipbuilding. Presentan una eslora de 67 metros, una manga de 30 metros y un desplazamiento máximo de 3.800 toneladas. Los dos primeros, AOS-501 Hibiki y AOS-502 Harima fueron construidos entre 1989 y 1991, entrando en servicio en 1991 y 1992, respectivamente [101].
El último tardó algo más, pues su construcción se aprobó en 2017 y comenzó en 2019, entrando en servicio el 4 de marzo de 2021 como AOS-5203 Aki. Todos ellos sirven en el Mando Oceanográfico / Grupo de Apoyo Anti-Submarino, en el 1er Cuerpo de Medidas Acústicas en la base naval de Kure y cuentan con el mismo sistema que los estadounidenses, el AN/UQQ-2 SURTASS LFA [101].
En menor medida, pues los sistemas no son comparables a los anteriormente mencionados, algunos países de la OTAN desarrollaron también sónares activos remolcados de baja frecuencia. Entre ellos, destaca Francia con el equipo SLASM (Système de Lutte Anti Sous-marine) desarrollado por la Marine Nationale e introducido en las fragatas D610 de la clase Tourville y D612 de la clase De Grasse [102].

Ilustración 19 – Buque de la clase Hibiki. Fuente: wikipedia.org.
Sistemas de Vigilancia Acústica Rusos
Al contrario que Estados Unidos, existe poca información pública acerca de un equivalente al sistema de vigilancia acústica SOSUS. Por su parte, Daniel Ford en su libro The Button, afirmó que “los soviéticos no tenían tecnología comparable capaz de llevar a cabo seguimiento en océano abierto de submarinos estadounidenses” [18]. A pesar de ello, en 1978 apareció un trozo de hidrófono de manufactura soviética. Si bien es cierto que no se supo esclarecer si provenía de una instalación en tierra o de un buque [103].
Estas hipótesis propuestas por Ford quedan confirmadas con los informes escritos en 1972 por la Agencia Central de Inteligencia (CIA) [104] y en 1974 por la Agencia de Inteligencia de la Defensa (DIA) [105]. En ambos documentos se recoge la existencia de sistemas de vigilancia acústica de corto alcance emplazados principalmente en estrechos estratégicos. Contaban con alcance reducido, trabajaban en pasivo y fueron introducidos en los años 60. Los soviéticos vieron en los sistemas no acústicos un camino para poder obtener vigilancia de largo alcance en la mar, razón por la que trabajaron bastante en su desarrollo.
Del mismo modo, Ford defiende que la Unión Soviética, muy previsiblemente, sustentaría sus esfuerzos en buques de superficie, submarinos y las sonoboyas lanzadas desde aviones de patrulla marítima. Sin olvidar a la importantísima flota de buques auxiliares de inteligencia, conocidos como AGI (Auxiliary General Intelligence). Tanto es así que un informe alertaba de que los soviéticos empleaban una cincuentena para misiones antisubmarinas, manteniendo una presencia constante en las bases navales más importantes [106].

Ilustración 20 – Estrechos estratégicos en el océano Ártico y Atlántico norte. Fuente: RAND.
En las fases más candentes de la Guerra Fría, la marina soviética desarrolló el concepto Strategic Bastion o Close Aboard Bastion (CAB) con la intención de proteger a sus submarinos estratégicos de las garras estadounidenses en el interior de las reivindicadas 12 millas territoriales [5, 107, 108, 109, 110]. De esta manera, se establecía un entorno seguro para no comprometer la misión, protegido por una poderosa fuerza antisubmarina. Estaba compuesta por una amalgama de instalaciones fijas, submarinos, buques de superficie y aviones [111].
Dicho concepto fue actualizado después de la caída de la Unión Soviética cuando en 1998, el presidente de la Federación Rusa Boris Yeltsin definió el North Strategic Bastion. Se concibió con la intención de proporcionar una disuasión nuclear creíble que permitiera la creación de una fuerza naval independiente y proteger los intereses rusos [112, 113].
En esta misma línea, es importante mencionar el Directorado Ruso para la Investigación en el Fondo Marino o Glavnoye Upravleniye Glubokovodnykh Issledovaniy (GUGI) creado en 1976. Es conocido por sus actividades clandestinas en el entorno submarino [114]. Cuenta con buques como el Yantar con capacidad para la detección y degradación de cables submarinos [13], así como cualquier otro tipo de trabajo a gran profundidad.
[ El resto de este artículo está disponible solo para suscriptores de la RevistaEjercitos.com ##eye##]
21/11/2022 Carlos D. González
- [message]
- Referencia Bibliográfica
- González, C. D. (2022, November 21). Nuevos horizontes en la detección Acústica Submarina. revistaejercitos.com. Retrieved November 21, 2022, from https://www.revistaejercitos.com/2022/11/21/nuevos-horizontes-en-la-deteccion-acustica-submarina/













COMMENTARIOS