




Todos los buques, independientemente de su forma y tamaño, emiten al mar un conjunto de radiaciones que configuran la denominada firma del buque. Esta firma caracteriza e identifica de forma unívoca al buque del mismo modo que las huellas dactilares identifican al ser humano. La importancia de esta firma es conocida desde comienzos del siglo pasado, especialmente en el ámbito de defensa y centrada de forma particular en las denominadas firmas acústica y magnética. Como ejemplo, las detecciones de los buques basados en su firma acústica tuvieron gran importancia en el ámbito naval durante la Segunda Guerra Mundial.
La firma global de un buque está compuesta por radiaciones: acústica, magnética, de campo eléctrico, de presión y sísmica. A lo largo de los últimos años, los esfuerzos de la comunidad internacional se han centrado principalmente en reducir la influencia acústica, con el doble objetivo de disminuir la detectabilidad del buque y reducir el nivel de contaminación acústica generada en el entorno marino. En la actualidad se está constatando con claridad la necesidad de actuar no sólo sobre la radiación acústica, sino sobre el conjunto global de las radiaciones del buque, tanto en el ámbito militar como en el ámbito civil, basado en aspectos como: la discreción de los buques, la seguridad en puertos e infraestructuras críticas y la protección ambiental. Como elemento clave para alcanzar esta meta, es de gran importancia tener a nuestra disposición sistemas de medida adaptables y altamente modulares que cubran el conjunto total de las radiaciones de los buques, con alta capacidad de transmisión de datos a centros base, con objeto de tener la capacidad de realizar medidas en toda clase de entornos marinos.
1, INTRODUCCION
Todos los buques, independientemente de su forma y tamaño, emiten al mar un conjunto de radiaciones que configuran la denominada firma del buque. Esta firma caracteriza e identifica de forma unívoca al buque del mismo modo que las huellas dactilares identifican al ser humano. La importancia de esta firma es conocida desde comienzos del siglo pasado, especialmente en el ámbito de defensa y centrada de forma particular en las denominadas firmas acústica y magnética. Como ejemplo, las detecciones de los buques basados en su firma acústica tuvieron gran importancia en el ámbito naval durante la Segunda Guerra Mundial.
En paralelo, con el avance de la tecnología durante el siglo XX y en especial en el ámbito de defensa se han desarrollado técnicas para reducir el nivel de las radiaciones emitidas al mar. Inicialmente, las técnicas de reducción se centraron en el ámbito de la radiación acústica, a la que siguió la radiación magnética para abarcar con posterioridad las radiaciones de campo eléctrico, de presión y sísmica. El conjunto de las cinco radiaciones mencionadas conforma la denominada firma multi-influencia de un buque. En la Figura 1 se presenta un ejemplo de simulación de firma eléctrica radiada por una rastra eléctrica.
 |
| Figura 1. Simulación del campo eléctrico radiado por una rastra eléctrica |
El control de la firma multi-influencia tiene gran importancia en el ámbito de defensa y en el caso de buques como los submarinos se convierte en cuestión de supervivencia. Asimismo, está adquiriendo cada vez más importancia en el ámbito civil ligado a la conservación del medio marino y en especial de la fauna marina que lo habita, debido a la incidencia de estas radiaciones sobre su comportamiento. Por último, es de resaltar que la detección de esta firma permite determinar la presencia de amenazas sobre puertos, infraestructuras críticas o bienes culturales en el fondo del mar, lo que posibilita la implementación de acciones para neutralizarlas.
El presente artículo comprende cuatro apartados además de esta introducción: en el primero de ellos se describen las principales características de las radiaciones que componen la firma multi-influencia, en los dos siguientes se analiza la importancia de esta firma en los ámbitos de defensa y civil, en el siguiente apartado se describe un sistema especialmente adaptado para la obtención de firmas multi-influencia. Finalmente se completa el artículo con las conclusiones obtenidas.
2. CARACTERÍSTICAS DE LA FIRMA MULTI-INFLUENCIA DE UN BUQUE
Como se ha mencionado con anterioridad la firma multi-influencia de un buque está compuesta por cinco tipos de radiación: acústica, magnética, eléctrica, de presión y sísmica. Cada una de ellas presenta características diferentes. A continuación se presenta una breve descripción de las principales características de cada una de ellas.
Radiación acústica
El sonido creado por una fuente que vibra se propaga como una onda dentro de un medio elástico como el mar, originando cambios de presión que son susceptibles de ser medidos.
La transmisión del sonido en el agua se caracteriza por su alto rendimiento, constituyendo de hecho la forma de radiación conocida que se propaga de forma más eficiente en este medio [1], pudiendo alcanzar grandes distancias en el caso de bajas frecuencias.
Los buques emiten dos tipos genéricos de señales: de banda ancha y de banda estrecha. La primera se caracteriza por abarcar un espectro amplio de frecuencias, mientras que la segunda se limita a un espectro reducido.
Existen diferentes fuentes de sonido en los buques, las tres principales son: ruido de maquinaria, ruido de la hélice y ruido de hidrodinámico. En la Figura 2 se muestra un esquema de propagación submarina del sonido utilizando un modelo de propagación acústica submarina.
 |
Figura 2. Caminos de propagación submarina del sonido obtenidos mediante un modelo de propagación
Radiación magnética
|
La influencia magnética de un buque está formada por dos componentes: la componente estática (SM) y la componente alterna (AM). La componente estática es generada por el campo magnético permanente y el campo magnético inducido.
La componente del campo magnético permanente aparece debido a la magnetización por el campo magnético terrestre de los materiales magnéticos con los que se construye el buque. Por otro lado, un buque siempre está en presencia de un campo magnético externo, el campo magnético terrestre, el cual contribuye asimismo a la firma magnética del buque. Esta componente depende del rumbo del buque y su localización en la tierra.
Además del campo magnético permanente e inducido, también contribuye a la firma magnética estática el campo CRM (Corrision Related Magnetic). Este campo es debido a la existencia de corrientes eléctricas de corrosión en el mar, que tienen un campo magnético asociado.
La componente alterna de la firma magnética es generada por:
• Las corrientes en las bobinas rotativas de las turbinas del buque. Estas actúan como dipolos magnéticos, los cuales generarán una firma magnética AC.
• Las corrientes de Foucault inducidas en el mar por los dipolos magnéticos. Estas corrientes son variables en el tiempo y están asociadas a los campos eléctricos AC.
• Corrientes eléctricas fluyendo en el casco debido a fallos de los equipos y / o un inadecuado diseño eléctrico del equipo.
• Campo magnético inherente radiado por cualquier maquinaria rotativa eléctrica en el buque.
Además, el rizado en la fuente de alimentación produce corrientes alternas hacia el mar. En la Figura 3 se presenta un ejemplo de simulación de campo magnético generado por un buque.
 |
| Figura 3. Simulación de campo magnético generado por un buque |
Radiación de campo eléctrico
La firma eléctrica de un buque está formada por una componente estática y una componente alterna. La componente estática se denomina UEP (Underwater Electric Potential) y representa la influencia en campo cercano. Se mide al paso del buque sobre un sensor o antena de sensores de campo eléctrico y su variación temporal depende de la velocidad y tamaño del buque. La firma eléctrica alterna se denomina ELFE (Extremely Low Frequency Electric). Tiene un ancho de banda máximo de 3 kHz aproximadamente y representa la influencia en campo cercano y lejano.
La firma eléctrica estática de un buque es debida a las corrientes eléctricas generadas en el proceso de corrosión galvánica. Para evitar dicha corrosión se utilizan los sistemas de protección catódica. Podemos diferenciar entre dos tipos, los pasivos y activos o ICCP (Impresed Current Cathodic Protection). Los sistemas pasivos utilizan ánodos de sacrificio, mientras que los sistemas activos utilizan ánodos de corriente impresa y electrodos de referencia. A menudo, los sistemas de protección catódica contribuyen a la firma eléctrica de una manera drástica, siendo éstos en la mayoría de los casos los generadores principales de la misma.
El campo eléctrico alterno o ELFE se debe a las siguientes fuentes:
1. Modulación de la corriente de corrosión: la corriente galvánica se modula debido al giro de palas y hélices.
2. Rizado en la alimentación de la maquinaria del buque. Aparece un tono de frecuencia correspondiente a la frecuencia de alimentación.
3. Rizado en sistemas de degaussing e ICCP, correspondiente a la modulación que sufre la corriente del sistema ICCP debido a la variación de la resistencia entre el eje y el casco del buque.
En la Figura 4 se muestra un ejemplo de simulación de firma eléctrica radiada por un buque.
 |
| Figura 4. Ejemplo de simulación de firma eléctrica radiada por un buque |
Radiación de presión
La presión hidrostática debida a la profundidad del agua varía lentamente por cambios en la presión atmosférica y por subidas y bajadas de la marea. Además, puede verse alterada rápidamente por olas y oleaje, o por el paso de un buque.
La variación de presión debida al paso de un buque usualmente es muy pequeña. Esta pequeña variación que constituye la firma de presión de un buque es producida por el efecto Bernoulli del agua fluyendo desde su proa hacia su popa. Se origina así un incremento de presión en la proa y popa y un decremento de presión en la zona central (succión), cuyo pico es directamente proporcional a la velocidad del buque y depende de la forma sumergida del mismo. En la Figura 5 se muestra la simulación de la firma de presión de un buque donde se aprecian los incrementos y decrementos característicos de este tipo de radiación por parte de un buque.
Por tanto, las fluctuaciones inducidas por el buque se superponen con la presión estática nominal en el fondo y las perturbaciones naturales ocasionadas por mareas, olas y oleaje.
 |
| Figura 5. Simulación de la firma de presión de un buque |
Radiación sísmica
La influencia sísmica es generada por las mismas fuentes del buque que originan la influencia acústica. Cuando una onda sonora alcanza una superficie, la mayor parte de su energía se refleja, pero un porcentaje de ésta es absorbida por el nuevo medio.
De este modo, las señales acústicas de muy baja frecuencia (por debajo de 10 Hz) se transmiten hasta el subsuelo del fondo marino y se propagan a través de éste como perturbación de tipo sísmico. Así este tipo de perturbaciones viajan más rápidamente por el fondo marino que por el agua.
Desde el punto de vista sísmico es obvio que la energía acústica que penetra en el fondo puede contribuir considerablemente en ocasiones a trasmisiones a media y larga distancia. Un ejemplo claro que muestra el comportamiento de las influencias sísmicas es la existencia de una frecuencia crítica a partir de la cual una pared rígida empieza a absorber parte de la energía de las ondas incidentes y que depende de las características de los materiales y capas que componen el fondo. En la Figura 6 se presenta un esquema de propagación submarina de la influencia sísmica de un buque.

Figura 6. Esquema de propagación submarina de la firma sísmica de un buque
3. LA FIRMA MULTI-INFLUENCIA EN EL AMBITO DE DEFENSA
Las bases de datos de inteligencia se han convertido en un elemento de gran importancia para las Armadas de los diferentes países. Estas bases de datos incluyen como elementos distintivos las firmas de los buques. Inicialmente contenían datos acústicos y en ocasiones magnéticos. En la actualidad buscan incorporar también datos referentes al resto de influencias. Estas bases de datos permiten discriminar no sólo el tipo y la clase del buque sino la unidad específica de la clase, lo que proporciona una ventaja táctica considerable.
En la actualidad se está acentuando la tendencia de las últimas décadas relativa a la disminución de las firmas de los buques. Esta tendencia es particularmente intensa en el caso de los submarinos, que ante el desarrollo de armas cada vez más inteligentes como los torpedos de última generación, buscan incrementar su nivel de protección al convertirse en buques cada vez más silenciosos. En la Figura 7 se muestra una imagen de submarinos del tipo U-206.
En paralelo con lo anterior, se están desarrollando sistemas cada vez más sofisticados que incorporan un amplio rango de sensores. El uso de estos sistemas multi-influencia permite incrementar de forma significativa la capacidad de detección de los buques a partir de la combinación de los datos proporcionados por los diferentes sensores, posibilitando una disminución apreciable del número de falsas alarmas en las detecciones.
Por otro lado, en el ámbito de la protección de las instalaciones de defensa, el uso de estos sensores multi-influencia está permitiendo incrementar de forma importante su seguridad, sobre la base de la detección temprana y más precisa de las diferentes amenazas procedentes del entorno marino, como buceadores desplazándose de forma autónoma, vehículos submarinos tripulados y no tripulados (SDV, ROV, UUV), mini-submarinos, etc.

Figura 7. Submarinos de la clase U-206: A.R.C Intrépido y A.R.C Indomable
4. LA FIRMA MULTI-INFLUENCIA EN EL AMBITO CIVIL
Durante los últimos años ha surgido una creciente concienciación en el ámbito internacional sobre la necesidad de proteger el medio ambiente marino, en especial de las actividades humanas como: la pesca, la navegación, las obras en entornos portuarios o la búsqueda de hidrocarburos en el fondo del mar, que conllevan aumentos significativos en el nivel de distintos contaminantes, como es el caso del ruido y otras fuentes de energía como la eléctrica o la magnética generadas en el entorno marino.
Esta creciente preocupación ha conllevado el desarrollo de diferentes normativas nacionales e internacionales enfocadas a una preservación efectiva del medio marino. Entre ellas, la Directiva Marco sobre la Estrategia Marina, promulgada por la Unión Europea en el año 2008 introduce un conjunto de descriptores cualitativos para determinar el buen estado ambiental, de los que uno de ellos corresponde a que: “La introducción de energía, incluido el ruido subacuático, se sitúe en niveles que no afecten de manera adversa al medio marino”. La aplicación efectiva de esta Directiva, y de otras normativas relacionadas con la protección del medio ambiente marino, conlleva tanto la medición del nivel de las diferentes radiaciones de energía emitidas al agua [2], como la detección de la presencia de la fauna marina en zonas específicas sobre las que se detectan elevados niveles de energía, con el fin de preservarla de sus posibles efectos nocivos. Esta detección se basa principalmente en sensores acústicos, aunque se están analizando otras posibles formas de detección como la detección de su presencia en base a la alteración que ejercen sobre el campo eléctrico o el campo magnético submarino. En la Figura 8 se incluyen dos especies de cetáceos: delfín mular y cachalote, ambas especies protegidas.
Al igual que en el ámbito de defensa, la utilización de sistemas de sensores multi-influencia proporciona una protección efectiva de puertos e infraestructuras críticas, como refinerías de petróleo o centrales eléctricas, ante intrusos con intenciones hostiles. Esta protección se puede extender asimismo a otros ámbitos de considerable interés como es la protección de reservas marinas, pecios o restos arqueológicos submarinos.


Figura 8. Especies de cetáceos: delfín mular (izquierda) y cachalote (derecha)
5. MEDIDAS DE LA FIRMA MULTI-INFLUENCIA
Con relación al ámbito de las medidas multi-influencia la tendencia en el ámbito civil es avanzar hacia un proceso de estandarización en los procedimientos y parámetros de las medidas, estándares que ya existen desde hace tiempo en el ámbito de defensa. En este caso, la precursora está siendo de nuevo la influencia acústica, para la que se ha desarrollado recientemente (2009) un estándar por parte de la Acoustical Society of America (ASA): “Quantities and Procedures for Description and Measurement of Underwater Sound from Ships”. Adicionalmente en el ámbito de la Unión Europea existen programas enfocados a la definición de un estándar europeo. Para poder establecer comparaciones entre medidas procedentes de diferentes sistemas, éstas suelen normalizarse a referencias comunes, como es el caso de un metro de distancia de la fuente para las medidas acústicas o un punto de referencia común para todos los buques para el caso de las medidas de campos eléctricos y magnéticos.
Los sensores multi-influencia proporcionan rangos de detección diferentes, lo que permite establecer diferentes capas de detección en función de su alcance. Las distancias de detección dependen tanto de las características específicas del medio marino como de las del buque bajo medida y de los sensores empleados. En una primera aproximación, se puede establecer que el sensor acústico y el sensor sísmico, siendo este especialmente dependiente de las condiciones antes mencionadas, proporcionan distancias de detección del orden de kilómetros, los sensores de campo eléctrico y magnético del orden de cientos de metros y el sensor de presión en el rango de decenas de metros.
El amplio rango de entornos operativos en los que es susceptible llevar a cabo medidas multi-influencia hace altamente aconsejable disponer de sistemas modulares, portátiles y de reducidas dimensiones y pesos que permitan su despliegue y recogida en diferentes áreas marinas en un intervalo reducido de tiempo y sin requerir medios complejos. Otros aspectos a ser remarcados son la capacidad de transmisión de datos a centros base (situados en tierra o embarcados en buques) con un ancho de banda adecuado a las características de las señales bajo medida, y la capacidad de almacenamiento de las influencias medidas y su procesamiento, enfocado a proporcionar información precisa y útil al operador del sistema.
Como ejemplo de un sistema que cumple con las características anteriormente descritas se encuentra el sistema MIRS, desarrollado por la empresa SAES (ver unidades submarinas del sistema desplegadas en el fondo del mar en Figura 9).

Figura 9. Unidades submarinas del sistema de medición multi-influencia MIRS desarrollado por SAES
El sistema MIRS ha sido probado en entornos operacionales mostrando su versatilidad, facilidad de manejo y precisión en las medidas tomando como referencia sistemas calibrados. En la Figura 10 se muestran resultados gráficos de las firmas multi-influencia de un buque mercante realizadas con MIRS.

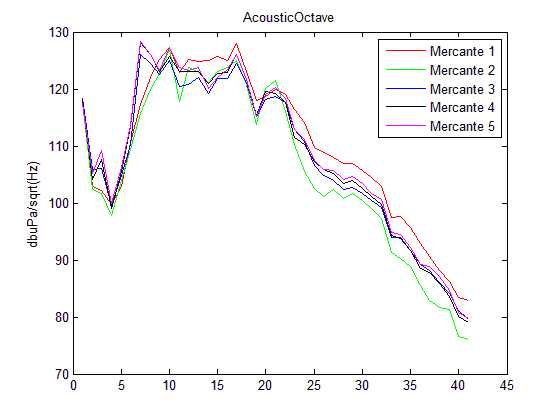



Figura 10. Conjunto de medidas de la influencia acústica (superior izquierda), sísmica (superior centro), magnética (superior derecha), eléctrica (inferior izquierda) y de presión (inferior derecha) de un buque mercante medidas con el sistema MIRS desarrollado por SAES
6. CONCLUSIONES
Todos los buques al desplazarse en el medio marino radian al mar un conjunto de influencias (acústica, magnética, eléctrica, de presión y sísmica) que conforman su firma multi-influencia. Algunas de estas influencias (acústica y magnética) han sido medidas desde hace décadas para caracterizar a los buques en el ámbito de defensa y evaluar la contaminación marina en el ámbito civil. Recientemente ha surgido el interés en la comunidad internacional de disponer de la firma completa de los buques para evaluar de forma global su impacto en el medio marino.
En el ámbito de defensa, el disponer de datos multi-influencia de los buques permite, desde un punto de vista de la protección de la propia flota, realizar las tareas y estudios de reducción de firma para disminuir la probabilidad de ser detectado. Por otro lado, desde el punto de vista de la detección de amenazas, permite caracterizar la firma de los buques para aumentar así la capacidad de detectarlos.
En el ámbito civil, el interés se centra en la preservación del medio marino y en especial de su fauna. En el ámbito dual defensa-civil, los sistemas de protección basados en sensores multi-influencia constituyen un medio altamente eficaz para la detección de intrusos y amenazas.
Debido a la variedad de los entornos operacionales en el medio marino, es altamente aconsejable disponer de sistemas modulares con capacidades contrastadas de transmisión de datos, registro de las medidas y procesamiento enfocado a proporcionar información relevante al operador del sistema. El sistema MIRS, desarrollado por SAES, se presenta como un sistema verificado y en servicio que cumple con los requisitos establecidos para las medidas multi-influencia de cualquier plataforma o dispositivo naval en todo el espectro de entornos operativos.
 Antonio Sánchez García
Antonio Sánchez García
Sociedad Anónima de Electrónica Submarina (SAES), Línea de actividad de I+D+i,
REFERENCIAS
[1] R. J. Urick. Principles of Underwater Sound. McGraw-Hill (1993).
[2] W. J. Richardson, C. R. Green, C. I. Malme, D. H. Thomson. Marine mammal and noise. Academic Press Inc. (1995).
elSnorkel.com agradece a SAES por compartir este material sobre la conferencia que SAES ofreció en la reciente Feria ColombiaMar 2013 (13 al 15 de marzo) titulada " MEDIDAS MULTI-INFLUENCIA COMO MEDIO PARA CARACTERIZAR LA FIRMA GLOBAL DE UN BUQUE Y PROTEGER EL ENTORNO MARINO".












COMMENTARIOS